Dokumentácia
Obsah
S týmto návodom to dokážete!
Čo potrebujete
- 1 Keystudio UNO R3
- 2 Continous servo FS90R
- 2 Kolečko na servo
- 1 Infračervený senzor (pre detekciu objektov)
- 2 Prototypovacie DPS
- 1 3.7V Batériu
- 1 Step up obvod (3.7V na 5V)
- 1 LED
- 1 Rezistor 150k
- 1 Rezistor 1k
- 1 Fototranzistor
- 1 Mikrospínač
- nejaké Piny
- nejaké Káble
- nejaké M3 skrutky
- nejaké M3 matice
- 1 3D tlačiareň
To je všetko!
Hardvér
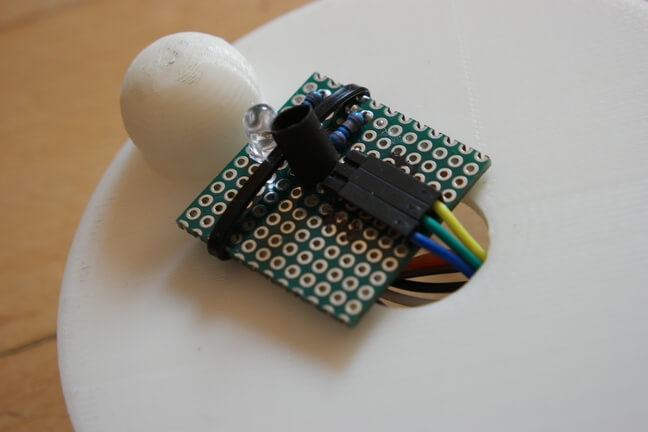
Najprv musíme vyrobiť senzor, tento robot na sledovanie čiary je iba s jedným senzorom, pre senzor potrebujeme jednu prototypovaciu DPS, LED, tri piny, spájkovačku, fototranzistor a oba odpory, 150k a 1k.
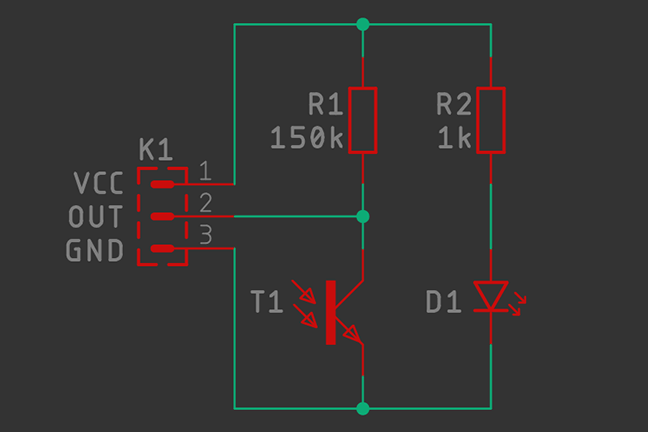
Druhou vecou, ktorú musíte urobiť, je zapojenie, takže senzor na čiaru bude pripojený do GND, OUT na Analógový pin 0 na Arduino a VCC na 3,3 V na Arduino. Potom musíte pripojiť ostatné komponenty.
Pravé servo VSTUP na Digitálny pin 9
Ľavé servo VSTUP na Digitálny pin 10
IR detekčný senzor na Digitálny pin 3
Klaibračný mód ON/OFF na Digitálny pin 4
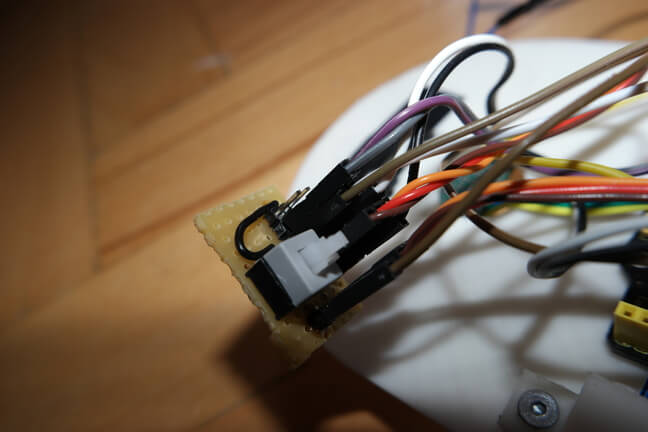
Kalibračný pin bude pripojený k tlačidlu na nasledujúcom DPS, kde budú pripojené všetky VCC (5V) a GND. Na to budete potrebovať spajkovačku, 15 pinov a káblov na spojenie všetkého dokopy.
Teraz, keď je všetko pripojené, stačí urobiť 3D tlačenú základňu a držiaky servo. Tieto časti si môžete stiahnuť kliknutím na tlačidlo nižšie.
Ak ste ho vytlačili, musíte ho dať dokopy, ako to má vyzerať, môžete vidieť v sekcii obrázkov.
Softvér
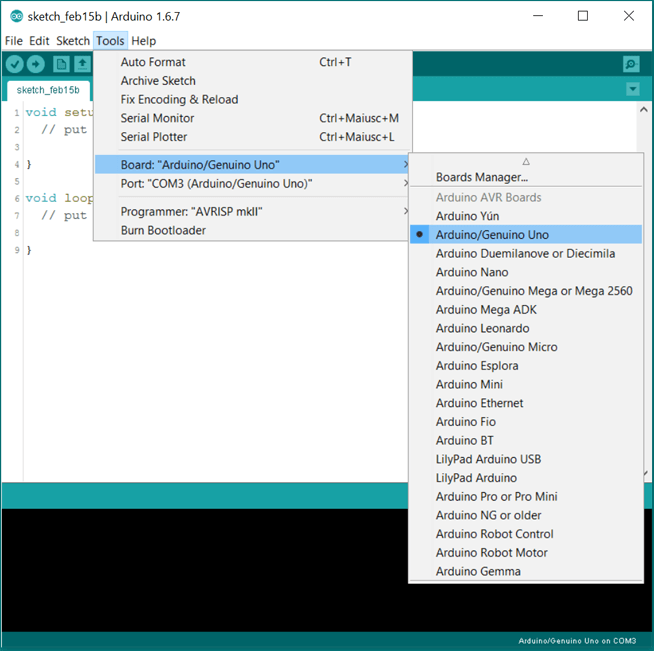
Ak ste robili niečo s Arduinom, môžete prejsť priamo do programovacej sekcie tu. Ak ešte nie, začnite s inštaláciou Arduino IDE.
Ak ste ho nainštalovali, musíte svoju dosku nastaviť na Arduino/Genuino UNO
Teraz je všetko hotové. Stačí už len nahrať program do svojho robota sledovania čiary.
Programovanie
Najprv musíme importovať knižnice a definovať niektoré premenné, ktoré budeme potrebovať v celom našom programe:
Teraz je tu kalibračná funkcia, ktorá kalibruje vášho robota. Ak je v kalibračnom režime, stačí ho umiestniť na čiaru a nakalibruje sa sám. Ak nie je v kalibračnom režime, bude to preskočené a robot bude pokračovať so svojími hodnotami uloženými v pamäti EEPROM.
Teraz naprogramujeme funkcie pre pohyb nášho robota:
Teraz sa potrebujeme dostať naokolo predmetu na čiare. Urobíme to nasledujúcou funkciou:
Už nám zostáva iba naprogramovať void setup() a void loop():
A loop, ak sme na bielom, ideme na čiernu, ale ak sme na čiernej, potom ideme na bielu, takže sme na okraji čiary.
Teraz to máte naprogramované, jednoducho nahrajte do robota a je to. Tento program si môžete tiež stiahnuť nižšie. Alebo si ho môžete celý prečítať tu.
Stiahnuť program GitHub
GitHub